Painting R2 parts
After being kicked out to the garage due to fumes... I started on painting all the remaining pieces either blue or primed/painted chrome etc.
Applying the Primer to all the parts regardless of color...

The paint I was using originally was not meant for plastic.. look as it dripped off the plastic...
Oh well, sand and re-paint once again...
This time with paint that works on Plastic

Look how that white is bleeding off the resin parts even after they had primer on them!

This is very strange, that white is bleeding off the Horseshoes which are made out of PVC wood.

The center foot, however came out perfect - strange.

Painted the radar eye... looks purdy!

Painted all parts of the legs and ankles

Final coat on the util arms...

center ankle is done

Now the detail parts...
went to Walmart, picked up a clothes drying rack that had a flat top shelf and wrapped it in paper. This allowed the parts that I was painting to be at eye level and allowed me to walk around the pieces as I painted.

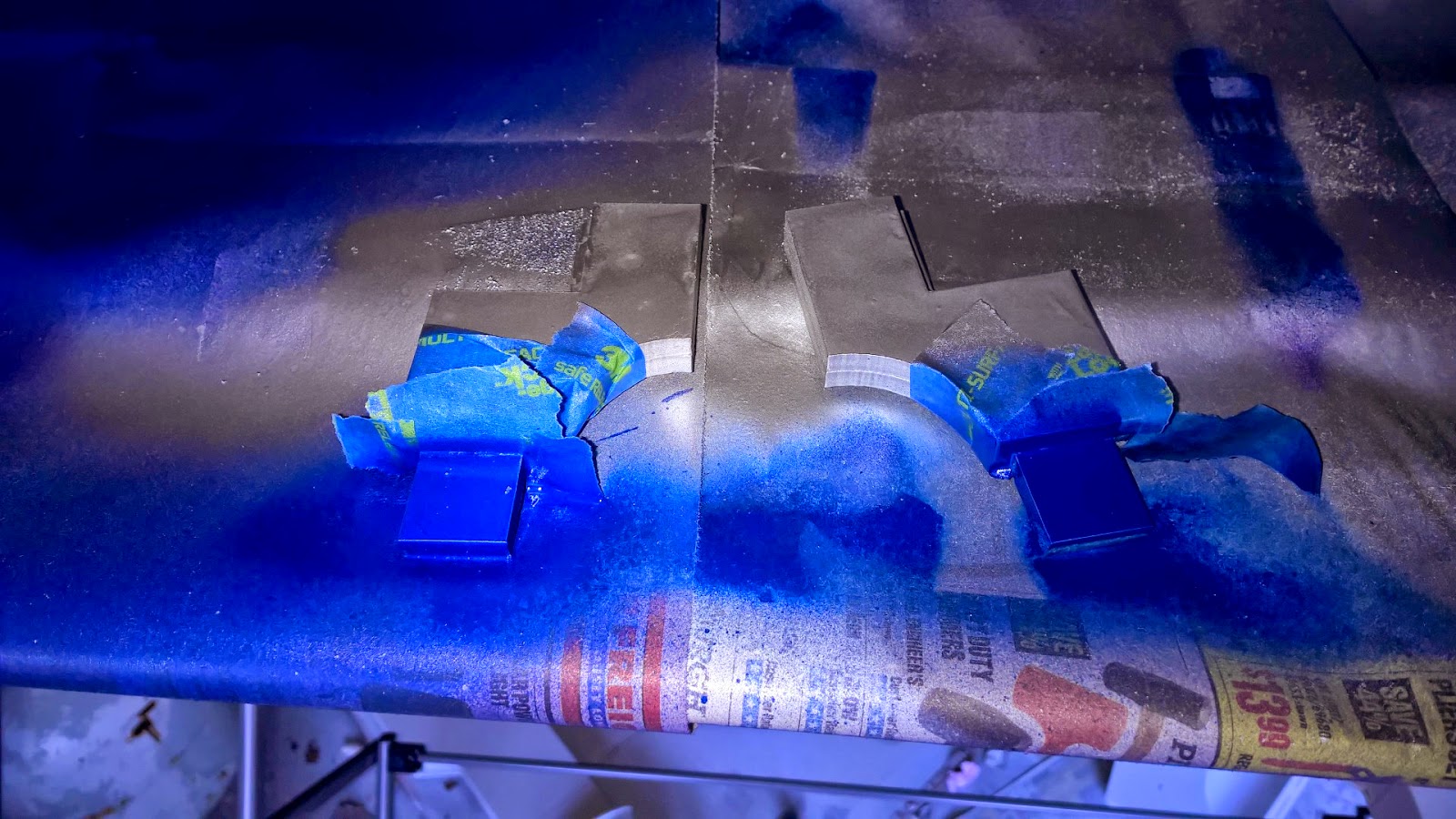
For anything that needed two colors, I would wait for the first color to dry, tape it off with painters tape and spray the other part of the piece... this worked out well!
There is another trait I see... the magic is...
Paint the part, wait 15 (no more) and paint again... if you come back later like 45 mins or even a day later it will do this at times...

Applying the blue paint to the ankle cylinders...

All these pieces too... need to the metal chrome in color... here we go.

Grabbed the legs and painted them alongside the horseshoes.

Let it all dry...




























